Birth of the Programmable Controller
Today’s post is extracted from my new “generic” PLC course manual, PLC Hardware and Programming – Multi-Platform. In the manual, I also cover the origins of the computer, beginning with the Babbage Analytical Engine, all the way back in 1823!
I have also created videos for both of these histories as part of my not-so-soon to be released online PLC training course. As my new business website evolves a bit more I plan to make them available for the low-low price of your e-mail address.
*************************************************
In 1968, a group of engineers at General Motors presented a paper at the Westinghouse conference detailing the problems they were having with reliability and documentation of the machines at their plant. One of the engineers, Bill Stone, also presented design criteria for a “standard machine controller”.
The criteria stated that the design would need to eliminate costly scrapping of assembly-line relays during model changeovers and replace unreliable electromechanical relays. It also needed to:
- Extend the advantages of static circuits to 90% of the machines in the plant.
- Reduce machine downtime related to controls problems, be easily maintained and programmed in line with already accepted relay ladder logic.
- Provide for future expansion. It had to be modular to allow for easy exchange of components and expandability.
- It had to work in an industrial environment with dirt, moisture, electromagnetism and vibration.
- Include full logic capabilities, except for data reduction functions.
These specifications, along with a proposal request to build a prototype, were given to four controls builders:
- Allen-Bradley, by way of Michigan-based Information Instruments, Inc.
- Digital Equipment Corporation (DEC)
- Century Detroit
- Bedford Associates
The DEC team brought a “mini-computer” to GM, which was rejected. A lack of static memory was one of the major reasons.
Allen-Bradley was a major manufacturer of relays, rheostats and motor controls. Even though this new idea would compete with one of its core businesses, electromechanical relays, they went from prototype to a production unit in 5 months. The first attempt was the Program Data Quantizer, or PDQ-II. This was judged to be too complex and difficult to program and was quite large. The next attempt was the Programmable Matrix Controller, or PMC. Though smaller and easier to program, this was still not sufficient for GM.
At the time of GM’s design criteria, Bedford Associates was already working on a design. Its system was modular and rugged, it used no interrupts for processing and mapped directly into memory. Since this was the 84th project for the company, they named this unit the 084. The project team included Richard Morley, Mike Greenberg, Jonas Landau, George Schwenk and Tom Boissevain. After obtaining funding, the team formed a new company called Modicon, an acronym for MOdular DIgital CONtroller.
The Modicon 084 was built ruggedly, with no on-off switch, no fans, and totally enclosed. Richard Morley explained, “No fans were used, and outside air was not allowed to enter the system for fear of contamination and corrosion. Mentally, we had imagined the programmable controller being underneath a truck, in the open, and being driven around in Texas, in Alaska. Under those circumstances, we wanted it to survive. The other requirement was that it stood on a pole, helping run a utility or a microwave station which was not climate controlled, and not serviced at all”.
In 1969, Bedford and Modicon demonstrated their 084 Programmable Controller to GM and won the contract. The controller consisted of three components: the processor board, the memory, and the logic solver board, which used a form of ladder logic to solve the algorithms.
According to Morley, the original machine only had 125 words of memory and did not need to run fast. In his interview with Howard Hendricks, he said “You can imagine what happened! First, we immediately ran out of memory, and second, the machine was much too slow to perform any function anywhere near the relay response time. Relay response times exist on the order of 1/60th of a second, and the topology formed by many cabinets full of relays transformed to code is significantly more than 125 words. We expanded the memory to 1K and thence to 4K. At 4K, it stood the test of time for quite a while. Initially, marketing and memory sizes were sold in 1K, 2K, 3K, (?) and 4K. The 3K was obviously the 4K version with constrained address so that field expansion to 4K could easily be done.”
Meanwhile, Allen-Bradley had gone back to the drawing board. By 1971, engineers Odo Struger and Ernst Dummermuth had begun to develop a new concept that improved on their PMC, Programmable Matrix Controller. This concept became the Bulletin 1774 PLC. Allen-Bradley named this the “Programmable Logic Controller”; the term later became the industrial standard when the acronym PC became associated with personal computers.
In 1972, Allen-Bradley also offered the first computer for use as a programming terminal. Other manufacturers in the 1970s and 1980s typically used dedicated programming terminals with (or without) a small screen. Instructions were entered as three or four letter mnemonics. As technology improved, these terminals were reduced in size to a hand-held device.
By the later years of the 1970s, several other companies had entered the PLC market, including General Electric, Square D, Omron and Siemens.
Modicon improved on the 084 in 1973 with the 184, which made them the early leader in the market. This was followed in 1975 with the 284 and 384 models. The 984 was produced in 1986 and remained a Modicon standard for many years. In a joint venture with AEG Schneider Automation, the Quantum series of controllers was released in 1994. In 1977, Modicon was bought by Gould Electronics, and later in 1997 by Schneider Electric, who still owns them today (2016).
PLC Improvements
The 1980s saw many new companies entering the PLC market. Japanese companies such as Mitsubishi and Omron entered the U.S. market as automotive manufacturing began using PLCs extensively in their manufacturing processes. Giants like Westinghouse, Cutler Hammer and Eaton created products, as well as machine tool manufacturers such as Giddings & Lewis. In 1980, the market was estimated at $80 million, and it had grown to a billion dollars worldwide by 1988.
As IBM-compatible personal computers became smaller and less expensive, companies began developing DOS-based software for use in programming. This allowed users to enter the program graphically. Rather than only seeing the alphanumeric characters of text commands, ladder logic could be visualized on a CRT monitor.
With the release of the Windows 3.0 operating system in the early 1990s, software had improved with colored graphics and multitasking. PC clones made computers less expensive, and the laptop computer all but replaced handheld programmers. Many companies began producing smaller, cheaper “brick” PLCs for simple applications. Allen-Bradley’s Micrologix 1000 in 1995 competed with relatively unknown names, such as Eagle Signal’s “Micro 190” and PLC Direct, which brand labeled Koyo PLCs from Japan.

Koyo had produced PLCs for Texas Instruments, Siemens, and GE since the 1980s. In 1994, they established a company in the U.S. that began marketing PLCs by mail order. Tim Hohmann founded PLC Direct in Atlanta as a joint venture, which was renamed Automation Direct in 1999.
Allen-Bradley remained the dominant brand in the U.S. during the 1990s. They had been bought by Rockwell in 1984 and spun off Rockwell Software in 1994 after purchasing ICOM, which had made a competing programming software product for the Allen-Bradley PLC. The SLC500 line, a smaller modular controller, was released in 1991, followed by the first MicroLogix product in 1995.
Siemens became the dominant player outside of the U.S. and Japan. The S5 controller, developed in 1979, had a large installed base in Europe through the 1980s. When the S7-200, S7-300 and S7-400 series were released in 1994, many companies began upgrading their existing platforms. Siemens was an early innovator in the use of User Defined Data Types (UDTs) and advanced programming using their version of Instruction List, known as STL (Statement List). They also allowed for use of re-useable code by defining local variables within subroutines, or functions.
In 1994, the International Electrotechnical Commission (IEC) began to define the languages that PLCs would be programmed in, data types, and other details pertinent to Programmable Controllers. IEC 61131-3 defined the rules manufacturers followed in order to standardize their products. Five languages were defined: Ladder (LD), Instruction List (IL), Function Block Diagram (FBD), Structured Text (ST), and Sequential Function Charts (SFC).
Mitsubishi gained the largest market share in Japan and much of Asia, while Omron saw gains worldwide.
By the 2000s, PLCs had become much more powerful and began gaining traction in process control, which had long been the domain of DCS (Distributed Control Systems). With the ability to use I/O networks such as DeviceNet, Profibus and Ethernet, these more powerful platforms became known as “Programmable Automation Controllers”, or PACs. With improved memory, higher speed processors and the ability to control thousands of analog and digital points at once, PACs could control large chemical processing plants, wastewater treatment and pipelines.
Multi-axis motion control also began to be integrated into PACs in the early 2000s. Allen-Bradley, Siemens, Modicon and Mitsubishi all have integrated controllers that can operate independently of the central CPU. Multiple or redundant CPUs can also be used within the same rack. Variable Frequency Drives (VFDs) and robots often now contain microprocessors that can be programmed in ladder logic. Hybrid HMI touchscreen controllers have also become common.
Today’s landscape includes more than 20 PLC manufacturers with international markets, with about 15 that have a 1% or more market share each. Open platforms have appeared allowing smaller manufacturers to offer their own PC-based or board-level controllers that program in ladder or other IEC 61131-3 languages. Companies such as Codesys now provide a platform for some of the major PLC manufacturers such as Modicon, ABB, Beckhoff and Bosch.
With higher speed Ethernet-based communication and control networks, systems have become more distributed, with microprocessors in “smart nodes” of I/O to detect errors and perform autonomous logic and monitoring tasks. As of 2016, the PLC market seems to be converging on Ethernet/IP based control networks.
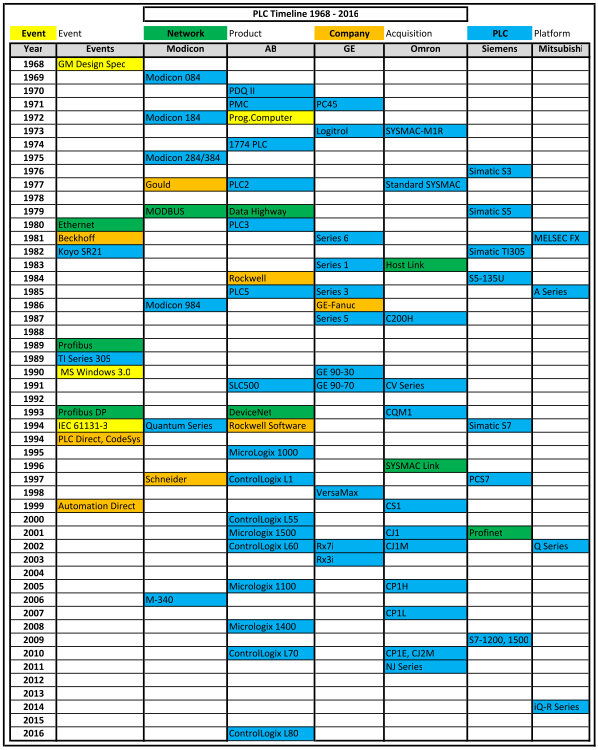
* This timeline is a work in progress… if you know of PLC families/platforms that should be on here, please shoot me an e-mail or leave a comment.
** For even more on PLCs, check out the PLC tab at the top of this page!

Electrical Engineer and business owner from the Nashville, Tennessee area. I also play music, Chess and Go.
I like to see the TI APT system here, late 80’s I think and a powerful Process Controller. Also that DCS’s and PLC were competing in process applications even in the 80’s
In the late 1970’s / early 1980’s Giddings & Lewis realized the need for a true motion controller for factory automation. Their PiC (Programmable Industrial Computer) was capable of complex servo motion that the PLC based products could not match. It took until the mid / late 1990’s for many to catch up. G&L Controls has now faded into history but their contributions were significant.
I did a lot with G&L PC400 system. I ran 5 electro/hydraulic axis. WAY ahead of everything else out there. Those were the days my friend.
perhaps your mention of ethernet/IP at the end should be changed to Ethernet as ethernet/IP is the Allen-Bradley protocol running on ethernet. Similarly Profinet, Modbus-TCP etc run on ethernet
Hi! Great article!
A lot of interest. To complete the picture, please add the Modicon M580 in your picture, released in 2013.
This is the very first ePAC, which means a complete Ethernet based controller even in the backplane, allowing tremendous level of performance and transparency, and as such uniquely enabling the next age of automation related to edge control, big data and IIoT
Thanks!
http://Www.Schneider-electric.com/M580
Digital Equipment Corporation did make a PLC in the early 70’s called a PDP14. I sold a number of them to chemical, metals, and glass companies. You programmed them with a PDP8 and could be networked. In fact at the time our only major competitor was Modicon.
Sadly, this timeline omits the major contributions made by Square D – particularly with its Sy/Max controllers.